Collect
Collect
 NavigateЈә
NavigateЈә»щУЪAT89C2051өДЦЗДЬРНЖыіө·АЧІұЁҫҜЖчөДЙијЖ
ЎЎЎЎҪйЙЬБЛAT89C2051
ЎЎЎЎёГ·АЧІұЁҫҜЖчАыУГі¬ЙщІЁј°јҜіЙ»ф¶ыФӘјюКөПЦ¶ФЖыіөөДІвҫаәНІвЛЩЈ¬АыУГөҘЖ¬»ъөДКөКұҝШЦЖәНКэҫЭҙҰАн№ҰДЬЈ¬НкіЙПөНіөДҝШЦЖЎЈОДХВёшіцБЛұЁҫҜЖчөДУІјюөзВ·ФӯАнј°ИнјюЙијЖЎЈ
ЎЎЎЎЛжЧЕПЦҙъЙъ»оҪЪЧаөДјУҝмЈ¬Ҫ»НЁКВ№К·ўЙъөДЖөВКТІФЪФцјУЈ¬ОӘМбёЯЖыіөФЛРРөД°ІИ«РФЈ¬ұҫОДҪйЙЬТ»ЦЦөҘЖ¬»ъҝШЦЖөДЖыіө·АЧІұЁҫҜПөНіЎЈёГЧ°ЦГҪ«өҘЖ¬»ъөДКөКұҝШЦЖј°КэҫЭҙҰАн№ҰДЬЈ¬Улі¬ЙщІЁөДІвҫајјКхЎў
ЎЎЎЎ1ЎЎі¬ЙщІЁІвҫаФӯАн
ЎЎЎЎі¬ЙщІЁІвҫаөДФӯАнКЗЈ¬НЁ№эІ»¶ПјмІві¬ЙщІЁ·ўЙдәуУцөҪХП°ӯОпЛщ·ҙЙдөД»ШІЁЈ¬ҙУ¶шІвіц·ўЙді¬ЙщІЁәНҪУКХөҪ»ШІЁөДКұјдІоTЈ¬И»әуЗуіцҫаАлSЈҪCЎБTЈҜ2Ј¬ЖдЦРЈ¬CОӘі¬ЙщІЁІЁЛЩЈ¬іЈОВПВИЎОӘ344mЈҜsЎЈЙщЛЩИ·¶ЁәуЈ¬Ц»ТӘІвөГі¬ЙщІЁНщ·өөДКұјдЈ¬јҙҝЙЗуөГҫаАлЎЈ
ЎЎЎЎ2ЎЎІвЛЩФӯАн
ЎЎЎЎЖыіөіөЛЩөДІвБҝКЗНЁ№э»ф¶ыјҜіЙҙ«ёРЖчАҙКөПЦөДЎЈјҙЈ¬Ҫ«Ч°УРУАҫГҙЕМъөДЧӘЕМөДКдИлЦбУліөВЦөДЧӘЦбПаБ¬Ј¬өұіөВЦЧӘ¶Ҝ
ЎЎЎЎ3ЎЎҝШЦЖЖчAT89C2051өД№ҰДЬУлМШөг
ЎЎЎЎAT89C2051КЗТ»ёцөН
ЎЎЎЎAT89C2051ЦРөДБҪёц16О»¶ЁКұЈҜјЖКэЖчјДҙжЖчT0әНT1Ј¬Чч¶ЁКұЖчКұЈ¬ҝЙјЖКэ»ъЖчЦЬЖЪЈ¬јЖКэЖөВКОӘХсөҙЖөВКөД1ЈҜ12Ј»ЧчјЖКэЖчКұЈ¬ҝЙ¶ФНвІҝКдИлТэҪЕP3Ј®4ЈҜT0әНP3Ј®5ЈҜT1ЙПіцПЦҙУ1ЦБ0өДұд»ҜКұФц1Ј¬јЖКэЖөВКОӘХсөҙЖөВКөД1ЈҜ24ЎЈ
ЎЎЎЎ4ЎЎУІјюПөНіЙијЖ
ЎЎЎЎёГұЁҫҜЖчУЙҝШЦЖПөНіЎўі¬ЙщІЁ·ўЙдөзВ·ЎўҪУКХөзВ·ЎўІвЛЩөзВ·ЎўұЁҫҜөзВ·Ўў
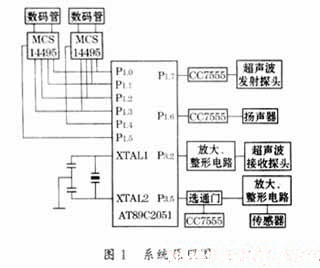
ЎЎЎЎі¬ЙщІЁ·ўЙдөзВ·УЙCC7555Кұ»щөзВ·әНі¬ЙщІЁ·ўЙдМҪН·ЧйіЙЎЈөҘЖ¬»ъAT89C2051өДP1Ј®7ТэҪЕҝШЦЖCC7555Кұ»щөзВ·ІъЙъ40kHzөДЖөВКРЕәЕёші¬ЙщІЁ·ўЙъЖчЈ¬УЙі¬ЙщІЁМҪН··ўЙдөДі¬ЙщІЁЙдПтХП°ӯОпЎЈАыУГі¬ЙщІЁІвҫаҫЯУРТФПВМШөгЈәІвБҝБйГф¶ИёЯЈ¬ҙ©НёБҰЗҝЈ¬ІвБҝЛЩ¶ИҝмЈ¬ІвБҝҪЗ¶ИҙуЈ¬ҝЙ¶ФҪПҙу·¶О§ДЪөДОпМеҪшРРјмІвЎЈ
ЎЎЎЎі¬ЙщІЁҪУКХөзВ·УЙі¬ЙщІЁҪУКХМҪН·Ўў
ЎЎЎЎІвЛЩөзВ·УЙҙ«ёРЖчЎўВціе·ЕҙуЖчЎўХыРОЖчЎўCC7555Кұ»щРЕәЕөзВ·ЎўСЎНЁГЕЧйіЙЎЈ»ф¶ыјҜіЙҙ«ёРЖчҪ«іөВЦЧӘЛЩРЕәЕұдіЙВціеРЕәЕКдіцЈ¬ҫӯ·ЕҙуЎўХыРОөзВ·әуЛНИлСЎНЁГЕЈ¬УЙCC7555Кұ»щөзВ·ІъЙъөДөҘО»Кұ»щРЕәЕҝШЦЖСЎНЁГЕөДҝӘУлұХЈ¬ТФҝШЦЖЧӘЛЩРЕәЕФЪөҘО»КұјдДЪНЁ№эСЎНЁГЕЈ¬ЛНИлөҘЖ¬»ъAT89C2051өДP3Ј®5ТэҪЕЈ¬ҝШЦЖT1јЖКэЖчјЖКэЈ¬КөПЦБЛФЪөҘО»КұјдДЪөДјЖКэЎЈ
ЎЎЎЎұЁҫҜөзВ·УЙCC7555өзВ·әНСпЙщЖчЧйіЙЎЈAT89C2051өДP1Ј®6ҝШЦЖCC7555өзВ·ёщҫЭІвБҝҪб№ыЈ¬ІъЙъТ»¶ЁЖөВКөДРЕәЕЗэ¶ҜСпЙщЖч·ўіцұЁҫҜЙщЎЈФЪСпЙщЖч·ўіцұЁҫҜЙщКұЈ¬Кұ»щөзВ·CC7555ҙҰУЪФЭОИМ¬Ј¬ҙЛКұөзФҙПтөзИЭідөзЈ¬ҙУ¶шК№CC7555ҪбКшФЭОИМ¬»ШёҙөҪОИ¶ЁЧҙМ¬Ј¬КдіцөНөзЖҪЈ¬К№СпЙщЖчНЈЦ№·ўіцұЁҫҜЙщЈ¬ЦұөҪПВТ»ҙОІвҫаҪбКшІъЙъРВөДұЁҫҜЙщЎЈ
ЎЎЎЎLEDПФКҫөзВ·УЙКэВл№ЬәНЗэ¶ҜөзВ·ЧйіЙЎЈУГБҪёцКэВл№ЬПФКҫҫаАлЈ¬КэВл№ЬІЙУГҫІМ¬ПФКҫЈ¬УЙ
ЎЎЎЎҝШЦЖЖчAT89C2051ЦчТӘНкіЙіМРтөДЦҙРРЎўКэҫЭөДҙҰАнәН¶ФНвІҝөзВ·өДКөКұҝШЦЖЎЈДЪІҝ¶ЁКұЖчT0№ӨЧчФЪ¶ЁКұ·ҪКҪЈ¬T0ФЪі¬ЙщІЁ·ўЙдКұҝӘКјјЖКэЈ¬өұP3Ј®2ТэҪЕКХөҪ»ШІЁәуЈ¬НЈЦ№јЖКэЈ¬T0ЛщјЖКұјдјҙОӘі¬ЙщІЁНщ·өҙ«КдКұјдЈ¬өҘЖ¬»ъ¶ФёГКэҫЭҪшРРҙҰАнЈ¬јҙҝЙІвіцҫаАлЎЈДЪІҝ¶ЁКұЖчT1№ӨЧчФЪјЖКэ·ҪКҪЈ¬УЙP3Ј®5ТэҪЕКдИлөДВціеРЕәЕҝШЦЖT1јЖКэЈ¬УЙT1ЛщјЖКэЦөИ·¶ЁЖыіөөДЧӘЛЩЎЈ
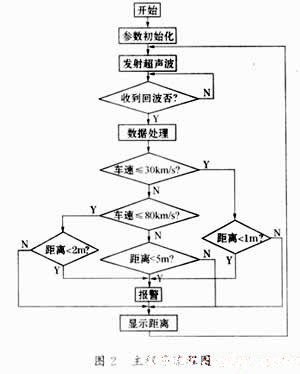
ЎЎЎЎөҘЖ¬»ъёщҫЭЛщІвҫаАләНіөЛЩҪшРРұИҪПЈ¬ЕР¶ПКЗ·сЗэ¶ҜұЁҫҜөзВ·ұЁҫҜЈ¬ИзЙи¶ЁЈәөұіөЛЩРЎУЪөИУЪ30kmЈҜsКұЈ¬°ІИ«ҫаАлУҰҙуУЪөИУЪ1mЈ»өұіөЛЩРЎУЪөИУЪ80kmЈҜsКұЈ¬°ІИ«ҫаАлУҰҙуУЪөИУЪ2mЈ»өұіөЛЩҙуУЪ80kmЈҜsКұЈ¬°ІИ«ҫаАлУҰҙуУЪөИУЪ5mЎЈ
ЎЎЎЎ5ЎЎИнјюЙијЖ
ЎЎЎЎұҫЧ°ЦГөДҝШЦЖИнјюТӘНкіЙПөНіөДіхКј»ҜЈ¬ҝШЦЖҙҘ·ўВціе
ЎЎЎЎ6ЎЎҪбКшУп
ЎЎЎЎұҫОДҪйЙЬөДЖыіөұЁҫҜЖчЈ¬АыУГ
PreЈәЖыіөУГҝӘ№ШОИС№ЖчМṩКдИлЛІКұөзС№ұЈ»Ө 2026-02-07
NextЈәAllegro РВҝоПЯРФҙ«ёРЖч БйГф¶ИёЯҙп 2.5mV/G 2026-02-07