对永磁无刷直流电机的控制经历了从模拟控制电路到以单片机为核心的数字控制电路的发展过程,本文介绍专用电机控制芯片TMS320F240对永磁无刷直流电机的控制。
2TMS320F240芯片功能简介
TMS320F240芯片内部有544字的双端口数据/程序RAM,16K的FLASH E2PROM;由于采用哈佛结构,三级流水线操作,TMS320F240大大提高了指令执行速度;在内部时钟20MHz时,指令周期为50ns;优化的CPU结构,更加快了指令执行速度,达到20MIPS。一次32位的计算只需一个指令周期,即50ns,这为复杂控制算法的实现提供了良好的条件。同时,TMS320F240的指令系统是与其它数字信号处理器一脉相承的,它提供了丰富的“乘累加”指令,这使电机控制中的数字滤波,如IIR、FIR等,可以方便快速地实现。
3基于TMS320F240的电机控制系统方案
3.1控制系统的硬件构成
系统的构成原理框图,如图1所示。系统主要由DSPs(TMS320F240)、存储器扩展模块、驱动放大电路、BLDC电机、电流检测装置和光盘编码器组成。当无线通讯模块接受主机发出的参考输入(转角和角速度),将其转换为PWM输出,经过驱动放大送给电机,产生输出。通过电路检测装置检测相电流,完成过流保护;光盘编码器检测电机的转动方向及转角,反馈回DSP系统,形成闭环控制,实时有效地控制运动精度。

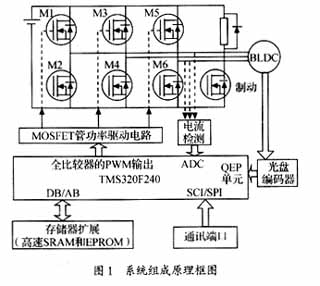
其中,考虑存储器扩展主要是TMS320F240内部存储容量有限,包括慢速EPROM和高速SRAM。选择慢速EPROM,主要是出于降低系统成本考虑,选择两片27C256-15,用于存储程序和初始化数据;高速SRAM用于程序执行和数据的暂存,程序和数据共用2片高速CY7C199-25,简化了系统硬件,也能满足系统的控制要求。
3.2无刷直流电机控制方案
对于中低速运行的无刷直流电机,可忽略绕组的电感,不考虑绕组换向过渡过程和电枢反应,只计各物理量对时间的平均值[1],可以得到简化方程:
(1) 电压方程式

式中Iav——平均电流,A
Tem——平均电磁转矩,N·m
ω——平均角速度,rad/s
u——直流电源电压,V
Δu——等效功率管导通压降,V
KE——等效电压常数,V/(rad·s-1)
Req——等效电阻,Ω
D——粘性阻尼系数,N·m/(rad·s-1)
Jm——电动机转动惯量,kg.m2
JL——负载转动惯量,kg.m2
Tf——摩擦转矩,N.m
TL——负载转矩,N.m
t——时间,s
在恒定电源电压,稳态情况下,运动方程式可以简化为:

式中K\-T——等效转矩常数,N.m/A
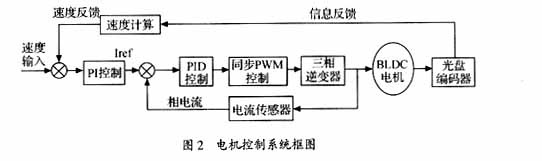
方程式(3)说明,BLDC电机的机械特性(转矩-转速特性)、转矩-电流特性是线性的。由此可以设计出BLDC电机的速度与电流环控制回路,如图2所示。
3.3位置与角速度检测回路
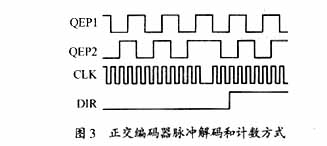
在TMS320F240的事件管理器(EV)中,有一个正交编码器脉冲(QEP)电路。当QEP电路被使用时,会对引脚CAP1/QEP1和CAP2/QEP2上的正交编码脉冲进行解码和计数。正交编码脉冲包含两个脉冲序列,有变化的频率和四分之一周期(90°)的固定相位偏移。当电机轴上的光盘编码器产生正交编码脉冲时,通过检测两个序列中哪个序列领先,可以测出电机的正反转;并据此对捕获的信号进行加减计数,如图3所示,从而得到当前的计数值和计数方向,即电机的角位移和转向。电机的角速度可以通过脉冲的频率测出。
4PWM波生成
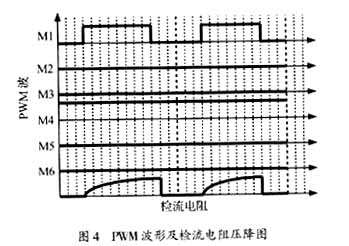
如图1所示,该电机直流驱动仅两相工作,即一相供给直流,另一相是返回电流,第三相空出。所以,在任一时刻仅有两个MOSFET管导通电流。假定M1和M4为导通的两个功率开关元件,那就有两种方法获得相应两相的理想电流:硬件斩波和软件斩波。
软件斩波过程中,M4在60°相位改变内保持“关”状态,同时M1根据电流环输出任务周期改变状态;硬件斩波过程中,根据同样的波形,M1和M4 均改变状态。TMS320F240支持两种斩波操作,过程如下:
软件斩波:CPU时钟=20MHz,PWM频率=20KHz,PWM任务周期对应变量COMP

硬件斩波:CPU时钟=20MHz,PWM频率=20kHz,PWM任务周期对应变量COMP
在软件斩波中获得的PWM波形,如图4所示。
5 结论
TI的专用电机控制芯片TMS320F240,功能全面,开发工具齐全,控制BLDC电机方便实用,将在运动控制领域逐步取代中高档单片机。
更多精彩请点击响拇指官方网站:http://www.sumzi.com

 收藏本站
收藏本站
 当前位置:
当前位置:






