Collect
Collect
 NavigateЃК
NavigateЃКЬНУиЛњЦїШЫКЫаФЃЌЕуССПЦММЁАЩСЙтЕуЁБ
ФПЧАЙњФкЛњЦїШЫаавЕЗЂеЙШчЛ№ШчнБЃЌгюЪїЁЂИЕРћвЖЁЂгХБибЁЁЂжЧдЊЕШжюЖргХауЛњЦїШЫећЛњГЇЯрМЬЕЎЩњЃЌФЧУДЛњЦїШЫЩцМАЕФКЫаФВПМўжївЊАќРЈФФаЉФиЃПМђЕЅЖдШЫаЮЛњЦїШЫММЪѕФЃПщНјааВ№НтЃЌДѓжТАќРЈПижЦФЃПщЁЂИажЊФЃПщЁЂдЫЖЏФЃПщЁЂЖЏСІФЃПщЁЂЩЂШШМАзмзАФЃПщЃЌЖјЙиМќВПМўдђжївЊгаМѕЫйЦїЁЂЫХЗўЕчЛњЁЂЫПИмЁЂДЋИаЦїЕШЁЃ
МѕЫйЦїАВзАдкЫХЗўЕчЛњКЭжДааЛњЙЙжЎМфЃЌЯрЕБгкЖўепжЎМфЕФЩВГЕЁЃЛњЦїШЫРяУцГЃгУЕФЪЧОЋУмЛњЦїШЫЃЌОпгаЬхЛ§аЁЛиГЬМфЯЖаЁЁЂОЋЖШНЯИпЁЂЪЙгУЪйУќГЄЁЂИќМгПЩППЮШЖЈЕШгХЕуЁЃЦфзїгУвЛЗНУцЪЧПЩвдБЃжЄОЋЖШЃЌСэвЛЗНУцЕБИКдиНЯДѓЁЂЕчЛњЙІТЪгаЯоЕМжТЪфГіХЄОиНЯаЁЪБПЩвдЬсИпХЄОиЁЃФПЧАЃЌОЋУмМѕЫйЦївбЗЂеЙГіаГВЈМѕЫйЦїЁЂRVМѕЫйЦїЁЂОЋУмаааЧМѕЫйЦїЕШМИРрВњЦЗЁЃ
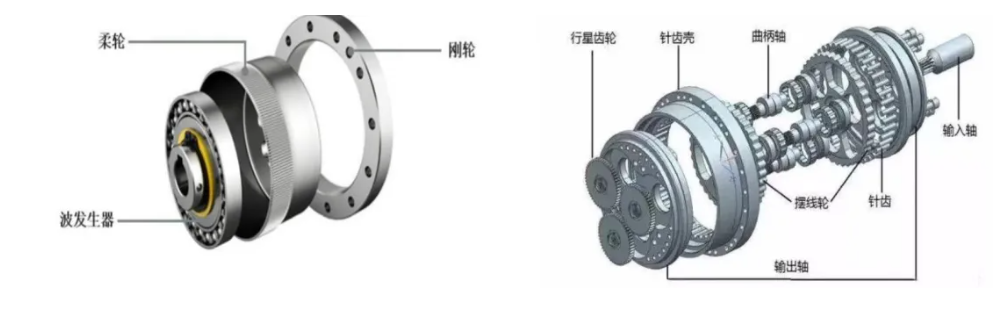
ЦфжаЃЌRVМѕЫйЦїКЭаГВЈМѕЫйЦїдкЛњЦїШЫжагІгУНЯЮЊГЩЪьЃЌЦфЬиЕуДѓжТШчЯТЃК
ЕБЧАЮвЙњМѕЫйЦїаавЕжївЊОРњСЫЫФИіНзЖЮЃК2005ФъжЎЧАвдДђЛљДЁЮЊжїЃЌВњЦЗНсЙЙвдАкЯпМѕЫйЛњЮЊжїЃЌадФмЕЅвЛЃЛЪЎвЛЮхЦкМфвдЗсИЛВњЦЗНсЙЙЮЊжївЊФПБъЃЛЪЎЖўЮхЦкМфЃЈ2011-2015ЃЉПЊЪМНјаазджїЙЅПЫЃЌRVМѕЫйЦїаЮГЩжааЁХњСПЩњВњФмСІЃЛЪЎШ§ЮхЦкМфЃЈ2016-2020ЃЉТЬЕФаГВЈЁЂЫЋЛЗДЋЖЏЕШЗмЦ№жБзЗЃЌЙњФкМѕЫйЛњПЊЪМЯђжаИпЖЫзЊвЦЁЃДгЪаГЁИёОжПДЃЌФПЧАЮвЙњRVМѕЫйЦїКЭаГВЈМѕЫйЦїЪаГЁОљгЩШеЯЕЦЗХЦеМОнжїЕМЕиЮЛЁЃЦфжаЃЌRVМѕЫйЦїЗНУцЃЌ2021ФъФЩВЉЬиЫЙПЫвд53%ЕФЪаГЁЗнЖюеМОнЪаГЁЕквЛЃЌЫЋЛЗДЋЖЏвд14%ЕФЗнЖюеМОнЪаГЁЕкЖўЃЛаГВЈМѕЫйЦїЗНУцЃЌ2022ФъЙўФЌФЩПЦвд38%ЕФЪаГЁЗнЖюеМОнЪаГЁЕквЛЃЌТЬЕФаГВЈвд 26%ЕФЗнЖюеМОнЪаГЁЕкЖўЃЌаГВЈМѕЫйЦїЕФЙњВњЛЏТЪТдИпгкRVМѕЫйЦїЁЃОЋУмМѕЫйЦїЕФжЦдьЩцМАН№ЪєВФСЯЁЂШШДІРэЁЂаЁФЃЪ§ГнТжгВГнУцМгЙЄЁЂМЏГЩМАМьВтЕШММЪѕЃЌЦфОЋУмадЁЂзМШЗадЖдВФСЯМАДІРэММЪѕЁЂМгЙЄЩшБИЁЂМгЙЄКЭМьВтММЪѕвЊЧѓМЋИпЃЌЖјЮвЙњМѕЫйЦїЗЂеЙгжЯрЖдНЯЭэЃЌвђДЫЦфгІгУНЯЖрвРРЕгкНјПкЁЃ
ЫХЗўЕчЛњЪЧвЛжжОЋШЗдЫЖЏПижЦЕФжДааЕчЖЏЛњЃЌПЩвддкЫХЗўЧ§ЖЏПижЦЯТЃЌЪЕЯжЕчЖЏЛњжсЩЯЕФХЄОиЁЂНЧЫйЖШКЭ/ЛђНЧЮЛвЦЪфГіЁЃЫХЗўЯЕЭГвЛАугЩЫХЗўЧ§ЖЏЦїКЭЫХЗўЕчЛњзщГЩЃЌЫХЗўЧ§ЖЏЦїЕФзїгУжївЊЪЧНЋдЫЖЏПижЦжИСюзЊЛЏЮЊЧ§ЖЏЫХЗўЕчЛњзіГіЯргІдЫЖЏЕФЧ§ЖЏЕчСІЃЌАќКЌЕчСїЁЂЕчбЙЁЂЦЕТЪЕШвЊЫиЁЃЕБЧАЃЌЛњЦїШЫЩЯГЃгУЕФЫХЗўЕчЛњжївЊЪЧЮоПђСІОиЕчЛњКЭПеаФБЕчЛњЃЌЪЪгУгкЛњЦїШЫЕФЙиНкЁЃ
ЮоПђСІОиЕчЛњГЦгРДХЮоЫЂжБСїЮоПђСІОиЕчЛњЃЌЪЧвЛжжОпгаНЯДѓОЖГЄБШЁЂНЯЖрЪ§ФПДХМЋЕФЬиЪтЕчЛњЁЃОпгаЬхЛ§аЁЁЂжЪСПЧсЁЂЙпСПЕЭЁЂНсЙЙНєДеЁЂЙІТЪИпЁЂЪЪХфадЧПЕШЬиЕуЃЌдкЛњЦїШЫЙиНкЁЂвНСЦЛњЦїШЫЁЂДЋИаЦїЭђЯђжсЁЂЮоШЫЛњЭЦНјКЭжЦЕМЯЕЭГЕШСьгђОпгаЙуЗКЕФгІгУЧАОАЁЃ
ЮоПђСІОиЕчЛњЕФЛљБОдРэгыДЋЭГгРДХЕчЛњвЛбљЃКгЩЧ§ЖЏЦїЙЉЕчЃЌЧ§ЖЏЦїПижЦU/V/WШ§ЯрЕчаЮГЩЕчДХГЁЃЌгРДХЬхЕФзЊзгдкДЫДХГЁЕФзїгУЯТзЊЖЏЁЃЮоПђСІОиЕчЛњВЛЭЌгкДЋЭГгРДХЕчЛњЕФЕиЗНдкгкУЛгаЛњПЧЃЌжЛгазЊзгКЭЖЈзгСНИіВПМўЁЃЮоПђСІОиЕчЛњЕФГіЯжЃЌШУЛњаЕНсЙЙЩшМЦВЛдйЪмжЦгкЕчЛњПЧЬхЕФЪјИПЃЛПЩвдРћгУЛњЦїЕФздЩэжсГажЇГХзЊзгЃЌНЋЕчЛњЮоЗьФкжУгкЛњЦїЩшМЦжаЁЃвдЬиЫЙРШЫаЮЛњЦїШЫЮЊР§ЃЌШЋЩэЙВга28ИіжДааЦїОљгУЕНЮоПђСІОиЕчЛњЃЌЦфжаа§зЊжДааЦїКЭЯпаджДааЦїИї14ИіЃЌетаЉжДааЦїЗжВМдкМчВПЁЂжтВПЁЂЭѓВПЁЂЧћИЩЁЂїХВПЁЂЯЅВПЁЂѕзВПЁЃа§зЊжДааЦїжївЊгЩЮоПђСІОиЕчЛњ+аГВЈМѕЫйЦї+ХЄОиДЋИаЦї+ЮЛжУДЋИаЦї+жсГаЃЈНЧНгДЅЧђжсГа+НЛВцдВжљЙізгжсГаЃЉ+БрТыЦїзщГЩЃЌЗжВМдкМчВП6ИіЁЂЭѓВП2ИіЁЂїХВП4ИіЁЂЧћИЩ2ИіЁЃ

ЯпаджДааЦїжївЊгЩЮоПђСІОиЕчЛњ+аааЧЙіжљЫПИм+СІОиДЋИаЦї+ЮЛжУДЋИаЦї+жсГаЃЈЫФЕуНгДЅЧђжсГа+ЩюЙЕЧђжсГаЃЉ+БрТыЦїзщГЩЃЌЗжВМдкжтВП2ИіЁЂЭѓВП4ИіЁЂїХВП2ИіЁЂЯЅВП2ИіЁЂѕзВП4ИіЁЃ
ДгОКељИёОжЩЯПДЃЌЮоПђСІОиЕчЛњВњЦЗШдвдКЃЭтЦѓвЕСьЯШЃЌЦфжївЊжЦдьЩЬАќРЈУРЙњПЦЖћФІИљЁЂЕТЙњЭўЬкЫЙЬЙЁЂШеБОФсЕУПЦЁЂУРЙњХЩПЫККФсЗкЕШЃЌЙњФкГЇЩЬШчВНПЦЙЩЗнЁЂъЛжОЛњЕчЕШвВЭЦГіСЫЯрЙиВњЦЗЃЌОпгавЛЖЈЕФВњЦЗСІЁЃ
ПеаФБЕчЛњгжГЦЁАЮоЬњаОЕчЛњЁБЃЌЪЧвЛжжЮоЬњаОзЊзгЕФжБСїЫХЗўЕчЛњЃЌЯпШІЮоФкВПжЇГХНсЙЙЃЌгЩЕМЯпШЦжЦЖјГЩЃЌЭЈГЃГпДчВЛГЌЙ§40mmЁЃгыЦеЭЈЕчЛњЯрБШЃЌПеаФБЕчЛњОпБИЬхЛ§аЁЃЌПижЦОЋЖШИпЁЂЪйУќГЄЁЂзЊЫйПьЁЂФмаЇИпЁЂФмСПУмЖШДѓЕШгХЪЦЃЌгыЭЌЕШЙІТЪЕФЬњаОЕчЛњЯрБШЦфжиСПЁЂЬхЛ§МѕЧс1/3-1/2ЃЌЯджјЬсИпФмСПУмЖШЁЃ
ШЫаЮЛњЦїШЫСщЧЩЪжЪЙгУЕФЕчЛњОЭЪЧПеаФБЕчЛњЁЃЬиЫЙРЛњЦїШЫСщЧЩЪжВЩгУЕФСљЕчЛњЧ§ЖЏЗНАИЃЌМДгЩПеаФБЕчЛњ+Ч§ЖЏЦї+МѕЫйЦї+БрТыЦїзщГЩЃЌФДжИЪЧВЩгУЫЋЕчЛњЧ§ЖЏЭфЧњКЭВрАкЃЌЦфгрЫФжИИїгУвЛИіЕчЛњДјЖЏЃЛЙњФквђЪБЛњЦїШЫЕФЮхжИСщЧЩЪжФкВПвВМЏГЩСЫ6ИіСІПиЮЂаЭЫХЗўЕчИзЃЌгЩПеаФБЕчЛњЁЂМѕЫйЦїЁЂЫПИЫЛњЙЙЁЂДЋИаЦївдМАЫХЗўПижЦЯЕЭГЕШзщГЩЁЃ

ДгПеаФБЕчЛњОКељСІЩЯПДЃЌЙњЭтСњЭЗЦѓвЕаЁГпДчЕчЛњЩшМЦФмСІЧПЃЌжБОЖзюаЁГпДчПЩжС 6mmЃЌЖјЙњФкЦѓвЕЩйга12mmвдЯТГпДчЕФПеаФБЕчЛњВњЦЗЃЌжБОЖЩЯЯовВБШНЯИпЁЃЕБЧАЃЌЙњЭтХХУћЧАСаЕФЙЋЫОжївЊЪЧШ№ЪПMaxon MotorЁЂЕТЙњИЃЖћЙўБДЁЂШ№ЪПЕУНнЁЂУРЙњAllied MotionЁЂМАШеБОФсЕУПЦЕШЃЛЙњФкСњЭЗЙЋЫОжївЊЪЧУљжОЕчЦїЃЌЭиАюЙЩЗнЁЂЖІжЧПЦММЁЂЮАДДЕчЦјЁЂъЛЩ§ЕчЛњвВЪЧживЊЕФПеаФБЕчЛњЙЋЫОЁЃ
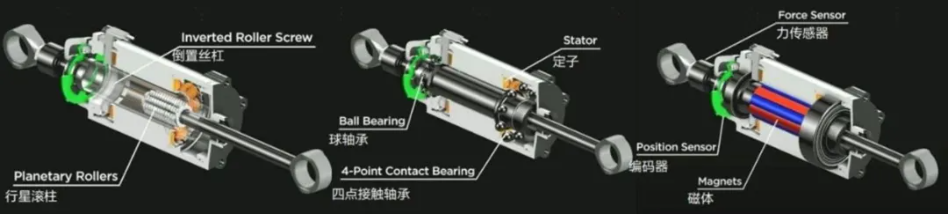
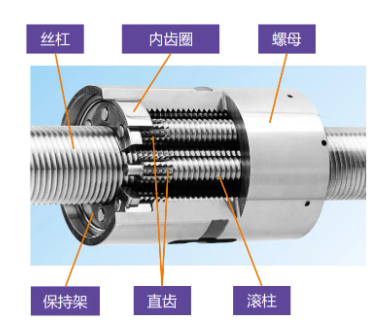
ЫПИмЪЧЛњаЕЩшБИжаГЃгУЕФДЋЖЏдЊМўЃЌЪЧНЋЛизЊдЫЖЏзЊЛЏЮЊжБЯпдЫЖЏЃЌЛђНЋжБЯпдЫЖЏзЊЛЏЮЊЛизЊдЫЖЏЕФРэЯыВњЦЗЃЌдкЛњЦїШЫжажївЊгУгкжБЯпЙиНкВПЮЛЁЃАДееФІВСЬиадЃЌЫПИмПЩЛЎЗжЮЊЛЌЖЏЫПИмЁЂЙіЖЏЫПИмКЭОВбЙЫПИмЃЌЦфжаЙіЖЏЫПИмгжПЩЗжЮЊЙіжщЫПИмКЭаааЧЙіжљЫПИмЃЌЙіжщЫПИмЪЧзюГЃгУЕФЫПИмаЮЪНЃЌЖјШЫаЮЛњЦїШЫДђПЊаааЧЙіжљЫПИмЕФгІгУПеМфЁЃ
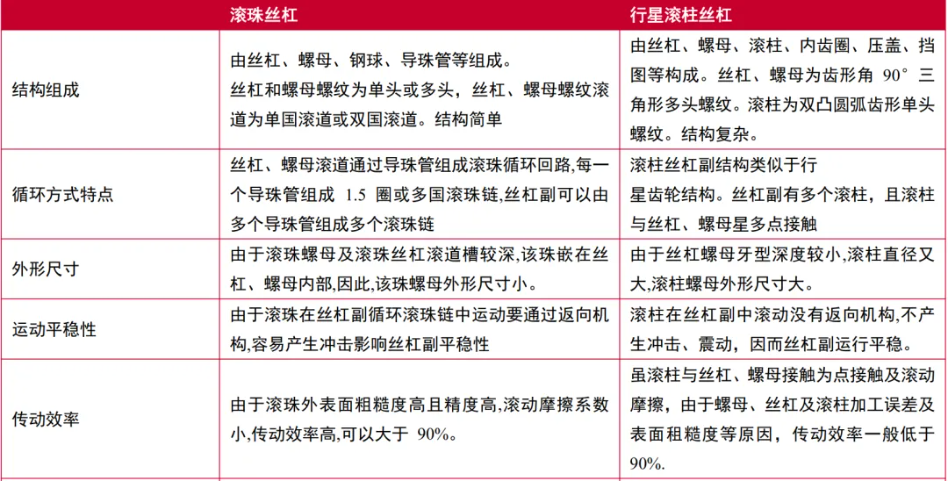
ЙіжщЫПИмЪЧЙЄвЕОЋУмЛњаЕжаГЃгУЕФДЋЖЏдЊМўЃЌЦфжївЊНсЙЙАќРЈЙіжщЫПИмЁЂЙіжщТнФИЁЂЙіжщШ§ВПЗжЁЃЙіжщЫПИмжївЊгІгУгкЛњДВЁЂзЈгУЩшБИЃЈАыЕМЬхЁЂЕчГижЦдьМАЦфЫћзЈгУЩшБИЃЉЁЂЙЄвЕздЖЏЛЏЁЂвНСЦЦїаЕЁЂЦћГЕЕШСьгђЁЃШЋЧђЙіжщЫПИмжЦдьЩЬжївЊАќРЈШеБОTHKЁЂШеБОЖїЫЙПЁЂЩЯвјПЦММЁЂШ№ЕфЫЙПцкЁЂвјЬЉПЦММЁЂВЉЬиОЋЙЄЁЂФЯОЉЙЄвеЁЂККНЛњДВЁЂЬьНђОЋвеОЋЙЄЕШЃЌШЋЧђTop5жЦдьЩЬдМеМШЋЧђЪаГЁЗнЖюЕФ45%ЁЃ
аааЧЙіжљЫПИмЪЧвЛжжПЩНЋа§зЊдЫЖЏКЭжБЯпдЫЖЏЯрЛЅзЊЛЏЕФЛњаЕДЋЖЏзАжУЃЌгыЙіжщЫПИмДЋЖЏЯрБШЃЌЦфЙіЖЏЬхВЛЪЧЖрИіЧђЬхЃЌЖјЪЧКЌгаТнЮЦЕФЖрИіЙіжљЬхЁЃТнФИЛђЫПИма§зЊдЫЖЏЭЈЙ§ЙіжљЕФаааЧдЫЖЏзЊЛЛЮЊжБЯпдЫЖЏЁЃаааЧЙіжљЫПИмДЋЖЏжаЬигаЕФЙіжљНсЙЙЃЌЪЙЕУЙіжљгыТнФИ(ЛђЙіжљгыЫПИм)жЎМфЮоЯрЖджсЯђЮЛвЦЃЌЙіжљФмЙЛдкЫПИмКЭТнФИаЮГЩЕФЗтБеПеМфФкЗДИДбЛЗдЫЖЏЁЃ
дкШЫаЮЛњЦїШЫСьгђЃЌаааЧЙіжљЫПИмжївЊгУгкжБЯпЙиНкВПЮЛЃЌвЛЬЈШЫаЮЛњЦїШЫвЛАуашвЊЪЙгУ14ИіЯпаджДааЦїЃЌУПИіжДааЦїОљХфБИвЛИіаааЧЙіжљЫПИмЁЃЫПИмзїЮЊЯпадЙиНкжаМлжЕСПеМБШзюИпЕФСуВПМўЃЌдМеМШЫаЮЛњЦїШЫКЫаФВПМўГЩБОЕФ15%ЁЃ
аааЧЙіжљЫПИмЪєгкОЋУмДЋЖЏСуВПМўЃЌЙіжљЫПИмМгЙЄЕФКЫаФдкгкМѕаЁЮѓВюЁЂЬсИпОЋЖШЁЃдкЕМГЬОЋЖШЗНУцЃЌЙњЭтаааЧЙіжљЫПИмСьЯШЦѓвЕвбОЪЕЯжG1-G5ШЋИВИЧЃЌЙњФкФПЧАаааЧЙіжљЫПИмМгЙЄжЦдьЩшБИЭЈЙ§ВЩгУЙіжщЫПИмжЦдьЩшБИЛђепбаЗЂзЈгУжЦдьЩшБИЃЌМгЙЄОЋЖШвВЛљБОПЩвдДяЕНG5МЖОЋЖШЁЃЪмЯогкМгЙЄЩшБИЁЂМгЙЄЙЄвеЁЂВФСЯКЭШШДІРэЙЄвеЁЂВтЪдЩшБИЁЂВњвЕЙЄШЫЕШвђЫиЕФгАЯьЃЌЕБЧАЙњФкаааЧЙіжљЫПИмВњЦЗЩаЮоЗЈЪЕЯжЙцФЃЛЏЩЬвЕгІгУЃЌЖјЙњЭтВњЦЗдђвбдкОќЙЄзАБИЁЂЦћГЕздЖЏЛЏВњЯпЁЂДѓаЭЛњДВЁЂЕчЖЏжДааЦїЕШСьгђЛёЕУЙцФЃЛЏгІгУЁЃдкЙњЭтНјПкВњЦЗЬцДњДѓТпМЯТЃЌЙњФкаааЧЙіжљЫПИмГЇЩЬДцдкзХОоДѓЕФЪаГЁЛњЛсЁЃ
ФПЧАЃЌЙњФкаааЧЙіжљЫПИмЪаГЁМЏжаЖШЯрЖдНЯИпЃЌЙњЭтЦѓвЕеМОндМ8ГЩЪаГЁЗнЖюЁЃЦфжаЃЌШ№ЪПGSAЁЂШ№ЪПRollvisИїеМОндМ26%ЪаГЁЃЌШ№ЕфEwellixЁЂЕТЙњRexrothЗжБ№еМОндМ14%ЁЂ12%ЪаГЁЃЛЙњФкЦѓвЕФЯОЉЙЄвеКЭВЉЬиОЋЙЄИїеМОндМ8%ЪаГЁЁЃ
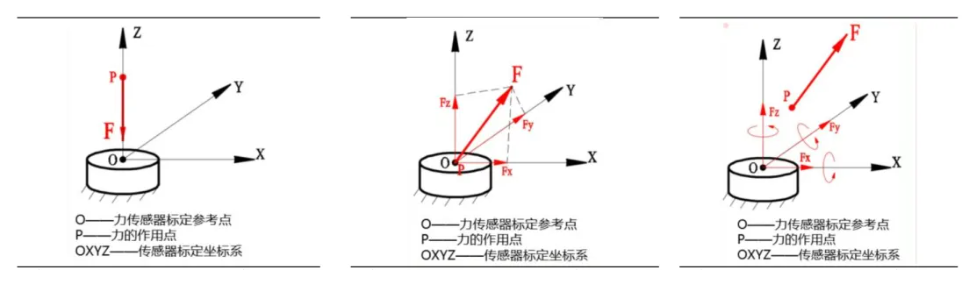
СІДЋИаЦїжївЊЪЧРћгУгІБфМЦКЭЕчКЩЗХДѓЦїНЋЛњаЕСІОизЊЛЏЮЊЕчаХКХЃЌвЛИіСІДЋИаЦїЭЈГЃАќКЌвЛИіЕЏадЬхКЭЖрИігІБфМЦЁЃИљОнВтСПЮЌЖШЃЌСІДЋИаЦїПЩЗжЮЊвЛжССљЮЌСІДЋИаЦїЃЌЦфжавдвЛЮЌЁЂШ§ЮЌЁЂСљЮЌСІДЋИаЦїзюЮЊГЃМћЁЃ
вЛЮЌСІДЋИаЦїЗНЯђгыБъЖЈзјБъжсжиКЯЃЌзїгУЕуЮЛгкБъЖЈВЮПМЕуЃЛШ§ЮЌСІДЋИаЦїЗНЯђЮоЯожЦЃЌзїгУЕуЮЛгкБъЖЈВЮПМЕуЃЛСљЮЌСІДЋИаЦїЖдгкЗНЯђКЭВЮПМЕуЖМЮоЯожЦЁЃзїЮЊЮЌЖШзюИпЕФСІДЋИаЦїЃЌСљЮЌСІДЋИаЦїЪЕМЪЩЯПЩвдЭЌЪБМьВт3ИіСІЗжСПКЭ3ИіСІОиЗжСПЃЌИљОнXЁЂYЁЂZЗНЯђЕФСІЗжСПКЭСІОиЗжСППЩвдЕУЕНКЯСІКЭКЯСІОиЁЃ
дкЛњЦїШЫММЪѕжаЃЌДЋИаЦїИљОнгУЭОПЩЗжЮЊФкВПДЋИаЦїКЭЭтВПДЋИаЦїЁЃФкВПДЋИаЦїжївЊгУгкМрВтЛњЦїШЫЕФФкВПзДЬЌЃЌШчЮЛжУЁЂЫйЖШКЭМгЫйЖШЕШЃЌжївЊАќРЈЮЛжУДЋИаЦїЁЂЫйЖШДЋИаЦїЁЂСІДЋИаЦїЁЂЦНКтДЋИаЦїКЭМгЫйЖШДЋИаЦїЕШЃЛЭтВПДЋИаЦїдђзЈзЂгкВЖзНЛњЦїШЫЭтВПЛЗОГЕФаХЯЂЃЌР§ШчОрРыЁЂЩљвєЁЂЙтЯпКЭДЅОѕЕШЃЌжївЊАќКЌЪгОѕДЋИаЦїЁЂДЅОѕДЋИаЦїЁЂЬ§ОѕДЋИаЦїЕШЁЃЦфжаЃЌСІДЋИаЦїЁЂДЅОѕДЋИаЦїКЭIMUЃЈЙпадДЋИаЦїЃЉЪЧШЫаЮЛњЦїШЫИажЊВуЕФКЫаФСуВПМўЁЃ
СљЮЌСІДЋИаЦїЭЈГЃАВзАгкЛњЦїШЫФЉЖЫжДааЦїгыЛњаЕБлжЎМфЃЌгУгкМьВтзївЕжаЕФЛњЦїШЫгыЛЗОГжЎМфЕФЖрЮЌНЛЛЅСІ/СІОиЃЌВЂНЋНЛЛЅСІ/СІОиЗДРЁИјЛњЦїШЫСІПижЦЯЕЭГЁЃБШШчЛњЦїШЫЭъГЩЕФзЅШЁЁЂВтСПЁЂвЦЖЏКЭЗХжУЕШЖЏзїЃЌашвЊЭЈЙ§ЖрЮЌСІДЋИаЦїМьВтЛњаЕЪжгыЛЗОГЕФНгДЅСІВЂЗДРЁзїгУгкЛњЦїШЫПижЦЦїЁЃ
ИљОнИпЙЄЛњЦїШЫВњвЕбаОПЫљЃЈGGIIЃЉЪ§ОнЃЌ2022ФъжаЙњЪаГЁСљЮЌСІ/СІОиДЋИаЦїЯњСП8360ЬзЃЌЦфжаЛњЦїШЫаавЕЯњЪл4840ЬзЃЛЦфдЄВт2027ФъжаЙњЪаГЁСљЮЌСІ/СІДЋИаЦїЯњСПгаЭћЭЛЦЦ84000ЬзЃЌИДКЯдіГЄТЪГЌЙ§60%ЃЌЦфжаЛњЦїШЫаавЕЯњЪлгаЭћЭЛЦЦ42000ЬзЃЛЪаГЁЙцФЃЗНУцЃЌGGIIЪ§ОнЯдЪО2022ФъжаЙњСљЮЌСІ/СІОиДЋИаЦїЪаГЁЙцФЃ2.39вкдЊЃЌЦфжаЛњЦїШЫаавЕСљЮЌСІ/СІОиДЋИаЦїЪаГЁЙцФЃ1.56вкЃЌЦфдЄМЦ2027ФъжаЙњСљЮЌСІ/СІОиДЋИаЦїЪаГЁЙцФЃНЋГЌЙ§15вкдЊЃЌCAGR ГЌЙ§45%ЁЃдкЪаГЁИёОжЗНУцЃЌФПЧАвдУРЙњATIЮЊДњБэЕФКЃЭтЦѓвЕжїЕМСЫШЋЧђСљЮЌСІДЋИаЦїЪаГЁЃЌЮвЙњСљЮЌСІДЋИаЦїЩаШдДІгкВњвЕдчЦкЃЌЯрЙиЦѓвЕАќРЈАВХрСњЁЂгюСЂвЧЦїЁЂРЄЮЌПЦММЁЂіЮОЋГЯЁЂРЖЕуДЅПиЕШЁЃ
ЙпадВтСПЕЅдЊЪЧВтСПЮяЬхШ§жсзЫЬЌНЧМАМгЫйЖШЕФзАжУЁЃвЛАуIMUАќРЈШ§жсЭгТнвЧМАШ§жсМгЫйЖШМЦЃЌВПЗжIMUЛЙАќРЈДХСІМЦКЭЦјбЙМЦЁЃЦфжаЃЌМгЫйМЦЪЧВтСПдкЦфБОЕиПђМмФкПчдНxЁЂyЁЂzжсЕФМгЫйЖШЃЛЭгТнвЧВтСПдкЦфБОЕиПђМмФкЮЇШЦxЁЂyКЭzжсЕФНЧЫйЖШЃЛДХЧПМЦдђЪЧвЛИіВтСПЕиЧђДХГЁВЂЬсЙЉКНЯђЕФДЋИаЦїЁЃдкЙпадДЋИаЦїдЊЦїМўжаЃЌЭгТнвЧКЭМгЫйЖШМЦзюЮЊКЫаФЃЌДХСІМЦЭЈГЃзїЮЊИЈжњЛђВЙГфЃЌвђЖјживЊадДЮгкЭгТнвЧКЭМгЫйЖШМЦЁЃ
IMUИљОнВтСПОЋЖШПЩвдМђЕЅЗжЮЊЕЭЁЂжаЁЂИпШ§ИіЕШМЖЃЌЗжБ№ЖдгІЯћЗбЕчзгВњЦЗЁЂЦћГЕРрВњЦЗКЭгюКНМЖВњЦЗЃК1ЃЉЯћЗбЕчзгРрIMUЃЌЭЈГЃгІгУгкЪжЛњЁЂжЧФмДЉДїжаЃЌОЋЖШвЊЧѓНЯЕЭЃЌМлжЕдкЧЇдЊвдЯТЃЛ2ЃЉЦћГЕРрIMUЃЌПМТЧЕНздЖЏМнЪЛЖдИпОЋЖШЕФвЊЧѓЃЌЦфМлИёдкЧЇдЊЕНЭђдЊМЖБ№ЃЛ3ЃЉгюКНМЖIMUЃЌГЃгУдкЕМЕЏЁЂКНЬьЕШЖдОЋЖШвЊЧѓМЋИпЕФСьгђЃЌМлИёдкМИЪЎЭђВЛЕШЁЃ
ФПЧАОпБИЭгТнвЧЛђМгЫйЖШМЦЩшМЦФмСІЕФЙњВњГЇЩЬжївЊгааОЖЏСЊПЦЁЂУїАДЋИаЃЈЫежнЙЬяНзгЙЋЫОЃЉЁЂЪПРМЮЂЁЂаЧЭјгюДяЁЂЩюЕЯАыЕМЬхЁЂЮљюЃПЦММЁЂУРЬЉПЦММЕШЃЌЦфжаЭЌЪБОпБИMEMS ЭгТнвЧЛђМгЫйЖШМЦЩшМЦФмСІЕФжївЊЪЧаОЖЏСЊПЦЁЂЪПРМЮЂЁЂУРЬЉПЦММЁЂжааЧВтПиЁЂЮЂдЊЪБДњЕШЁЃОпБИДХСІМЦЛђЕзВуДХДЋИаЦїММЪѕЕФЙњВњГЇЩЬжївЊгаЩюЕЯАыЕМЬхЁЂЮљюЃПЦММЁЂУРаТАыЕМЬхЁЂЖрЮЌПЦММЁЂВгШ№ПЦММЁЂФЩаОЮЂЕШЁЃДггІгУСьгђРДПДЃЌЯћЗбЕчзгЁЂЙЄвЕЁЂЦћГЕЮЊжївЊгІгУГЁОАЃЌШЫаЮЛњЦїШЫСьгђднЮогІгУЁЃ
ДЅОѕДЋИаЦїЪЧСЌНгЛњЦїШЫДЅОѕИажЊЯЕЭГгыЮяРэЪРНчЕФЕзВуКЫаФдЊМўЃЌЙІФмЪЧНЋЛњаЕДЬМЄзЊЛЛЮЊЕчаХКХЃЌШЛКѓДЋЪфИјЛњЦїШЫЕФПижЦЯЕЭГЃЌДгЖјЪЕЯжЖдЭтНчЮяЬхЕФИажЊКЭЗДРЁЁЃФПЧАЃЌШЫаЮЛњЦїШЫЕФДЅОѕДЋИаЦїжївЊМЏжадкЪжВПЁЂзуВПЁЂЧћИЩЕШВПЮЛЃЌгУгкЪЕЯжЖдЮяЬхЕФзЅШЁЁЂЖдЕиУцЕФЦНКтЁЂЖдЭтСІЕФЗДРЁЕШЙІФмЁЃ
ФПЧАЃЌШЋЧђДЅОѕДЋИаЦїЪаГЁжївЊБЛХЗУРКЭШеБОЕШЗЂДяЙњМвЕФЦѓвЕеМОнЃЌШчЕТЙњКЃЕТККЁЂУРЙњЛєФсЮЄЖћЁЂШеБОЖрФІДЈЁЂХЗФЗСњЕШЃЛЙњВњДЅОѕДЋИаЦїШдДІгкЦ№ВННзЖЮЃЌжївЊгІгУгкжаЕЭЖЫЪаГЁЃЌжївЊЦѓвЕАќРЈККЭўПЦММЁЂАТЕЯЭўЁЂФЋЯжПЦММЕШЁЃ
PreЃКзі3DИаВтЯЕЭГЩшМЦФбЃПЪдЪд3D ЛєЖћаЇгІДЋИаЦїЃЁ 2026-06-07
NextЃКАыЕМЬхжаЕФЙѓзхЁЊЩщЛЏяи 2026-06-07