 收藏本站
收藏本站
 当前位置:
当前位置:无位置传感器无刷直流电动机的高速驱动系统
TDA5142T是Philips公司生产的无位置传感器无刷直流电机专用控制芯片,该芯片内含起动电路,全波换相电路和保护电路,可方便地实现无位置传感器无刷直流电机的起动和控制。MP6403是东芝公司生产的一种高功率逆变桥模块,专用于三相电机和双极脉冲电机的驱动,最大的额定漏极电流ID=±5A[1]。MP6403与TDA5142T两者的结合可大大简化无位置传感器无刷直流电机起动和控制。
本文将介绍一种适用于工业控制中的无位置传感器BLDCM调速系统,并着重介绍了TDA5142T的换相技术、起动技术和速度控制技术。
2 无位置传感器BLDCM专用芯片TDA5142T的调速原理
TDA5142T是一种用于驱动三相全波无位置传感器无刷直流电动机的双极型集成电路,采用24脚双列表面SOL封装[2]。TDA5142T主要由起动振荡器、3个反电动势比较器、自适应换相时延电路、独立运算放大器(OTA)和换相逻辑电路组成。
起动振荡器可方便地解决无位置传感器BLDCM的起动问题;3个反电动势比较器和自适应换相时延电路主要用于获取电机转子的精确的位置信号;位置信号送给换相逻辑电路以后,被转换成6路驱动输出信号,3路上侧驱动输出信号(OUT-PA,OUT-PB,OUT-PC)和3路下侧输出信号(OUT-NA,OUT-NB,OUT-NC)。这6路信号均具有0.2A的驱动电流,可直接带动外接功率MOSFET或双极晶体管,驱动电机运转。
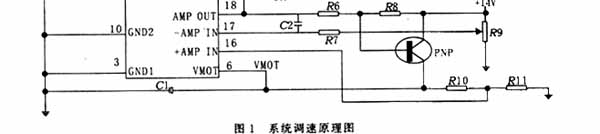
TDA5142T的调速主要由OTA和外搭的放大电路实现,通过调节电位计R9,改变MOSFET的电源电压VMOT,进而改变电机的转速,图1为系统工作原理图。


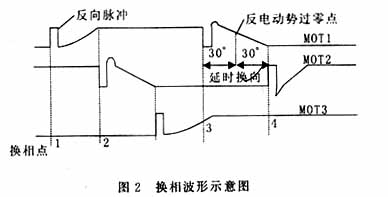
换相是通过改变定子绕组电流方向,使得转子一直朝某一固定的方向运转(顺时针或逆时针),TDA5142T的换相时刻主要通过3个反电动势比较器检测三相绕组的反电动势来实现。在任一周期,3个绕组中必有2个绕组分别处于高压(H)态或低压(L)态,只有1个绕组处于高阻(F)态,F态的反电动势过零点既可提供电机的转速信息FG,又可控制绕组的换相。理论上,换相时刻与F态的过零点时刻相差30°电角度;实际上,正确的换相时刻还得由自适应换相时延电路电容CAP-CD、CAP-DC进行修正,2个电容的值决定了电机的最佳换相时刻。在任一换相周期CAP-CD电容先被充电,后被放电,电压范围为(0.9V,2.7V),充电电流为Ic=8.1μA,放电电流为If=16.2μA;电容CAP-DC则用于重复CAP-CD的充放电过程,只是Ic=If=15.5μA。图2为电机绕组波形图,实验中CAP-CD电容值可以等于CAP-DC电容值,此值决定了电机的换相频率,即电机的转速,下式为其与换相频率的关系。
2.2 起动技术
无位置传感器BLDCM在静止及低速转动时,反电动势为零或近似为零,H、L、F态三者无法通过检测区别,如果通过外搭电路实现电机的平滑起动、电流换向和速度检测,系统设计将十分繁琐,即使设计成功,系统的效率也很难得到保证。采用TDA5142T芯片,则可大大简化上述设计问题,只需选定一个起动电容CAP-ST即可实现电机的平滑起动,而且系统响应速度快、起动电流小。
TDA5142T主要采用起动振荡器换相脉冲的激励方法进行起动,振荡器只在电机刚起动时工作,一旦反电动势足够大,振荡器立即停止工作,电机起动完成。刚起动时,从振荡器产生的每个脉冲都引起TDA5142T的6个输出脚从一种状态转换到另一种状态,从而激励电机运转。如果反电动势不够大,电动机将再转一步,并在新的位置下振荡[3]。为防止脉冲在错误的振荡相位到达,振荡幅值必须在下个脉冲到达之前有足够大的衰减。电机起动振荡频率
f和起动电容的选取如下:
式中 kt——电动机转矩常数
![]()
如果电动机转矩常数和转动惯量不知道,可以按以下方法选定起动电容:
![]() 的起动电容值,即使CAP-ST=2μF。
的起动电容值,即使CAP-ST=2μF。
(2)如果电机运转良好,减少![]() 的起动电容值,即使CAP-ST=0.5μF。
的起动电容值,即使CAP-ST=0.5μF。
(3)按照上述的![]() 增减法,增长率大或减少CAP-ST的大小,直至电机由静止变为转动或由转动变为静止,则最后一次换电容之前的值即为最佳起动电容值。
增减法,增长率大或减少CAP-ST的大小,直至电机由静止变为转动或由转动变为静止,则最后一次换电容之前的值即为最佳起动电容值。
需注意的是,起动电容过大,电机也能正常运转,但起动时间将拉长,起动时效降低。
2.3 电机速度控制
TDA5142T可以通过两种方式改变电机的工作转速:
第一种是在电压一定下,通过改变自适应换相时延电路电容CAP-CD、CAP-DC来改变换相频率,进而改变电机的转速,它们与速度的关系式如下:![]()
第二种方式是利用TDA5142T内部的独立运算放大器OTA进行模拟方式或数字(PWM)方式控制,以下简称OTA控制。
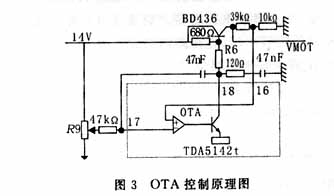
前者是在额定电压下通过改变最佳换相时刻,而直接改变电机的换相频率fc,进而改变电机的转速n;后者是通过改变驱动输出级的电源电压VMOT而实现无级调速,图3为OTA控制电路原理图。此电路属典型的模拟分压电路,所有的三极管均工作在放大状态,R6和680Ω电阻为三极管BD436提供基极电流,对于不同的三极管,R6的取值应不同,但最重要的是保证BD436工作在线性放大状态。实验时,TDA5142T的17脚电压若与VMOT电压之比为1∶5时,则说明工作正常,否则R6选取不当。
2.4 实验结果
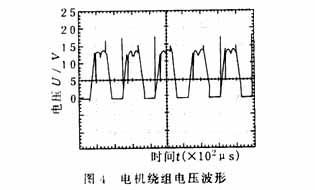
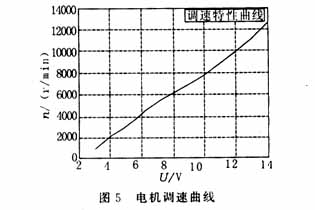
采用TDA5142T芯片和MP6403芯片构成的无位置传感器无刷直流电机调速系统简单实用,在工业控制中具有广泛的应用价值。
上一篇:红外热成象仪用行扫描无刷直流电机的研究 2025-11-03
下一篇:解决无刷直流电机转矩波动的一种方法 2025-11-03







