 收藏本站
收藏本站
 当前位置:
当前位置:解决无刷直流电机转矩波动的一种方法
由于永磁无刷直流电机的定子绕组在位置传感器的控制下,一相一相地依次供电,实现了各相绕组电流的换相,在换相过程中,定子各相绕组中电流在工作气隙内所形成的旋转磁场是跳跃式的,由此产生的电机转矩波动较大,这样会引起一定的振动噪声,影响了它的应用领域,特别是家电行业。当然可以通过改变电子换相控制线路的方式来改善电机转矩的波动。
本文介绍以Y-Δ混合连接绕组[1],将一系列谐波大大削弱,减少运行中的振动噪声,以改善电机转矩波动。
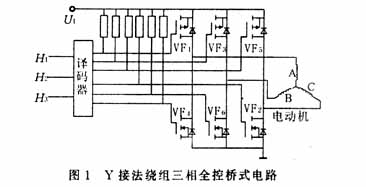
2 三相全控方式下Y接法绕组产生的电机转矩
转子上的永久磁钢是产生电机气隙中的磁场,该磁场与定子绕组产生的磁场相互作用,产生电机转矩,不同的供电方式,所产生的电机转矩是不同的。三相全控通电控制线路如图1所示,在位置传感器的作用下依次切换绕组中的电流,在两两导通方式下,每一绕组通电时间为120°电角度,每隔60°电角度换相1次,为了分析方便,在分析时假定:

(2)绕组通电时,该电流所产生的磁通对气隙磁通的影响忽略不计。
(3)由于电机转矩的力臂都是相同的,所以把电磁力的方向看作电机转矩的方向。
(4)各相绕组对称,其对应的电路单元完全一致。
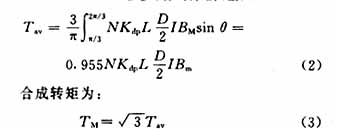
由于假设转子磁钢所产生的磁感应强度在电机气隙中是按正弦规律分布的,即B=Bmsinθ,这样,如果在定子某一相(例如A相)绕组中通一直流电流,则所产生的转矩[2]为:
式中 N——每相绕组串联的匝数
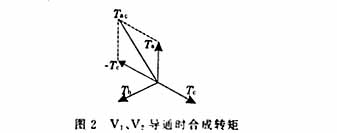
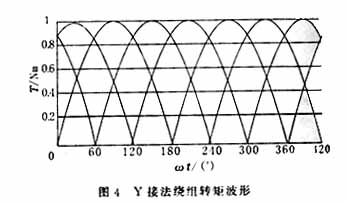
某一相通以不变的直流后,它和转子磁场作用所产生的转矩也将随着转子位置的不同而按正弦规律变化,在三相全控电路的工作下,实际上每相绕组通过的不是持续不变的直流电流,只是通过1/3周期的矩形波电流,那么该电流和转子磁场作用所产生的转矩也是1/3周期的正弦转矩曲线,且这一段曲线与绕组开始通电时的转子相对位置有关,在绕组通电120°的时间里,载流导体正好处在比较强的气隙磁场中,它所产生的转矩脉冲小,平均值较大,在三相Y连接全控电路两两导通方式下,每一瞬间有两个功率管导通,每隔1/6周期(60°电角度)换相1次,每次换相一个功率管,每一功率管导通120°电角度,各功率管的导通顺序是V1V2,V2V3,V3V4,V4V5,V5V6,V6V1,当功率管V1和V2导通时,电流从V1流入A相绕组,再从C相绕组流出,经V2管回到电源,则它们合成转矩如图2所示,其大小为
3 Y-Δ混合连接绕组的转矩分析
永磁无刷直流电动机在运行时,其气隙中的磁场是一个波幅恒定不变的旋转波,根据三相绕组建立气隙磁场[3]的分析可知,将这一旋转波等效认为是由三相对称绕组产生的,其基波表示为:
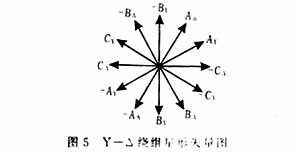
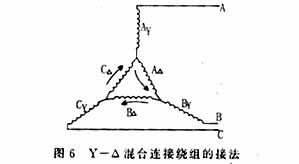
Y-Δ混合连接绕组是把普通的60°相带三相绕组分成两套三相绕组,这两套绕组之间在空间相位上彼此相差30°电角度,其中一套采用Δ接法,一套采用Y接法,即把原60°相带分为两个30°相带,分别放置两套绕组,其磁势星形矢量图为图5,两套绕组串联连接如图6所示。
在采用Y-Δ混合连接绕组时,若能满足或基本满足,Y连接部分的绕组所产生的感应电势在时间上滞后于Δ连接部分的绕组所产生的感应电势—21—30°电角度(这可由两部分绕组在相带中所占的位置决定),并基本满足三角形绕组和星形绕组分别是对称的30°相带的三相绕组,并使每相绕组电压在时间上相差120°,让两部分绕组产生的磁势幅值相等,便可以完全消除或大大削弱5、7、17、19等6K±1(K=奇数)次谐波磁势,从而改善气隙磁场波形,使谐波转矩下降,改善电机转矩。
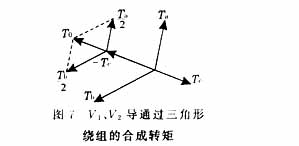
由于在三相全控两两通电方式中,每瞬间有2个功率管通电,每隔60°换相一次,每次有一个功率管换向,每个功率管导通120°,即当功率管V1和V2导通时,电流从V1流入星形绕组的A相,流过三角形绕组时,分别通过C相绕组和A、B两相串联的绕组,再从星形绕组的C相绕组V2管流出,这时星形绕组产生的合成转矩矢量同图2,考虑三角形绕组中的电流方向,产生的合成转矩矢量为图7。
![]() I,B、A相中的电流为
I,B、A相中的电流为![]() ,如果三角形绕组每相串联匝数为
,如果三角形绕组每相串联匝数为![]() ,则三角形C相绕组所产生的平均转矩由式(2)得:
,则三角形C相绕组所产生的平均转矩由式(2)得:
可见,两套绕组所产生的合成转矩在幅值上相等,但在空间相差了30°电角度,其转矩星形矢量图同图5,相当于将原来每隔60°换相一次,转变为每隔30°就换相一次,其合成转矩的波动就大为减少,仅为0.966∶1,比用Y形绕组的0.87∶1要提高了许多,从而改善了电机转矩的性能。
上一篇:无位置传感器无刷直流电动机的高速驱动系统 2025-11-03
下一篇:无刷直流电机转子位置检测的新方法 2025-11-03







