 收藏本站
收藏本站
 当前位置:
当前位置:适合多种应用的电机驱动IC
从技术角度看,所有的powerSPIN器件都采用第三代BCD(双极晶体管、CMOS管和DMOS管)技术,这种耐用的经过证明的1mm线宽智能功率制造技术能够集成双极晶体管、模拟及逻辑电路专用的低中压CMOS管、击穿电压高达80V的功率DMOS晶体管、高达40
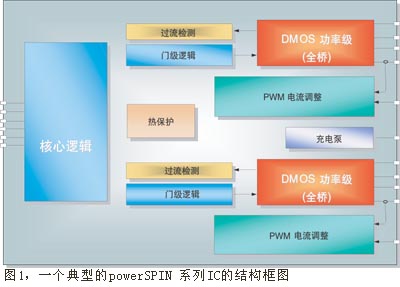
按照功能划分,这个产品系列可以分为五大类,最基本的器件提供了带CMOS/TTL输入逻辑以及几个保护功能的全保护型双H驱动桥,而最复杂的器件是为驱动双极步进电机或BLCD电机而专门优化的全集成驱动器,从而大幅度减少了电机控制应用所需的外围元器件的数量。
powerSPIN系列的另一个重要特性是,所有产品都共用相同的开发支持工具,这套工具包括评估板、PC软件和详细的应用说明。命名为practiSPIN的评估环境在PC与电机驱动器之间建立了一个图形界面,同时还执行功耗和热分析的仿真功能。
图4所示是一个为驱动两相(两极)步进电机专门优化的powerSPIN系列产品L6208的框图,这个器件集成了8个配置成两个全桥的功率DMOS晶体管、一个执行相位生成功能的集中式逻辑电路和电机每个相位都需要的关断时间恒定的PWM电流控制器(准同步模式)以及其它的实现安全操作和灵活性的功能。解码逻辑能够生成三个不同的步进序列,使这个器件能够适合各种应用,包括微步进应用。
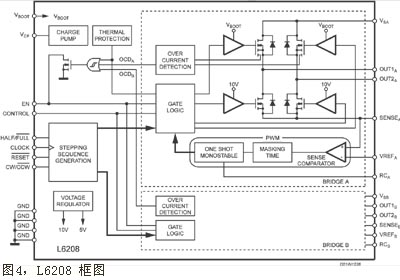
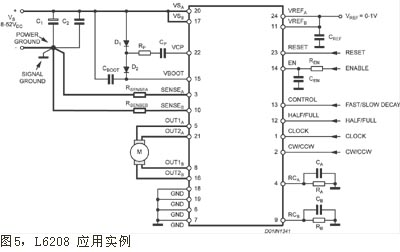
尽管在典型应用中,两个模拟输入VrefA和VrefB相互连接在一起,以便在两个电机绕组上取得相同的电流,但是系统能够向每个引脚单独施加不同的可变电压信号,允许在两个电机绕组上出现不同的电流分布。微步进就是这样的一个典型实例,在微步进中参考电压是调整后的相差为90。的正弦波。
关断时间内的电桥特性可以在快速与慢速衰减模式之间选择:每种模式都有可能是最适合的方式,具体情况视多种应用条件而定,如电源电压和电机电气特性。当选择了快速衰减模式时,电流重新返回到电源电压轨,所以线圈上的电压就是极性相反的电源电压本身;在快速衰减模式下,全桥的下桥臂晶体管在关断时间内被关断,电流围绕全桥的上半桥重新循环,线圈上的电压接近零电压。
相位序列信号发生器是一个状态机,为这两个电桥提供Phase 和 Enable输入信号,以全步进或半步进的方式驱动一个步进电机。全步进有两种模式:每步激活两个相位的正常驱动模式和每步只激活一个相位的波形驱动模式。驱动模式由半桥/全桥
 |
时钟输入信号的上升边缘使状态机提前进入下一个状态,旋转方向由CW/CCW输入信号设定,复位输入用于重新设置状态机。
图4所示的典型应用电路说明这个器件所需的外部组件数量非常少,实际上,这些必要的组件是充电泵组件,充电泵为上桥臂功率DMOS管、敏感电阻器、PWM单稳态电路的阻容组件和体电容器C1生成自举的栅驱动电压。
在直流无刷电机中的应用
无刷直流电机(BLDC)比有刷直流电机多几个优点,例如:由于没有电刷,前者比后者多一个内在的可靠性,无刷电机的绕组不在转子上,而在定子上,因此排除绕组产生的热量更加容易,当电机必须封闭时,这是一个特别有利的因素。在传统方法上,这些优势是以更复杂的成本昂贵的控制电路为代价的。由于通过绕组的电流不是通过电刷换向的,所以每个绕组必须通过一个半桥以电子方式控制电流,控制电路必须通过传感器(典型情况下是霍尔传感器)或者通过测量未驱动绕组的反电动势获取转子位置的信息。
随着电机驱动平台如powerSPIN的问世,这个历史问题的复杂性被大幅度降低。图6所示是L6235的一个框图,这个单片驱动器集成了驱动一个三相BLDC所需的电路和霍尔效应传感器,其中包括一个三相DMOS电桥、一个关断时间恒定的PWM电流控制器和单端霍尔传感器的解码逻辑,解码逻辑用于产生功率级所需的序列信号。L6235与其它多种多样的powerSPIN系列产品共用多种模块,然而,这个器件是专门为BLDC电机优化的专用驱动器。
这个三相桥路驱动器由六个DMOS晶体管组成,连接方式如图6所示。在25℃时典型通态电阻功耗为0.3W,每个DMOS晶体管都内置一个快速续流二极管。PWM电流控制器和霍尔效应传感器解码逻辑生成开关模式。交叉传导保护是利用上桥臂上的两个功率MOSFET的通断之间的死时(典型时长1ms,由一个内部定时电路设定)实现的。
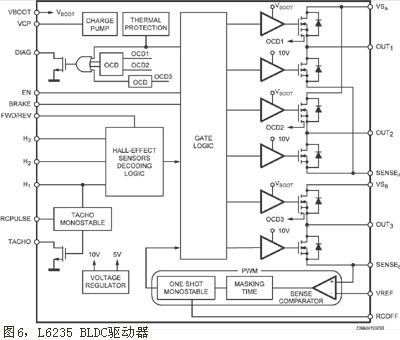
根据在3个在三相BLDC电机内检测转子位置的霍尔传感器发来的信号,解码逻辑模块提供正确的三相电桥的输出驱动电压。针对60、120、240和360电度间隔的传感器,这个创新的复合逻辑电路能够辨别转子的实际位置,这种解码方法将一个无需为选择传感器配置而指定专用引脚的通用IC变成了现实。
TACHO(转速)引脚允许设计人员通过一个外部运算放大器轻松地实现转速控制回路,实际上,这个转速计功能是由一个关断时间恒定的单稳态电路组成,其输入是一个霍尔效应传感器信号(H1),输出信号驱动漏极开路的TACHO的输出引脚。在霍尔效应传感器信号H1的每个上升边缘时,单稳态电路被触发,连接TACHO引脚的MOSFET管被定时关断;把转速计的引脚与一个外部上拉电阻相连,就可以得到一个平均值与霍尔效应传感器信号频率成正比例的输出信号,从而也就可以得到与电机转速成正比例的输出信号。这种设计只需很少的外部组件即可实现一个成本效益型的转速控制回路,如图7所示。

powerSPIN平台的一个最重要的优点就是,它允许机电设计人员针对特殊应用,选择最具有成本效益型的电机——有刷直流电机、无刷直流电机或者步进电机,而不必更改设计步骤和计算结果,甚至更重要的是不必改变开发环境。另一个值得注意的是,实现了这一设想的第三代BCD最初是为大批量制造的汽车应用及计算机外设开发的,而目前正在被广泛地用于提供创新的解决方案,以满足各种本身本来无法支付这项技术的巨额开发成本的应用需求。
上一篇:电机控制基本原理 2026-06-14
下一篇:步进运动控制技术纵览 2026-06-14







